Mechatronic Mimicry
This page focuses on the hyper-soundwalk installations that Explorator chirper has realised. The design and construction of the Explorator chirper species is covered on this page: here
Behaviour Routine
The Chirper-facilitated Hyper-Soundwalk Series installation
scenario begins with Chirper’s installation in a natural environment following the
pop-up exhibition strategy. Once installed, the artefact initiates its listening routine
where it proceeds to identify and store rhythmic motifs heard in the in-situ
sonic environment. After the species analyses and stores its interpretation of the
sound, the artefact sometimes responds with its own vocalisation. After vocalising,
Chirper deactivates its solenoids and proceeds to provide audio-reactive non-cochlear
feedback while it listens for another opportunity to vocalise.
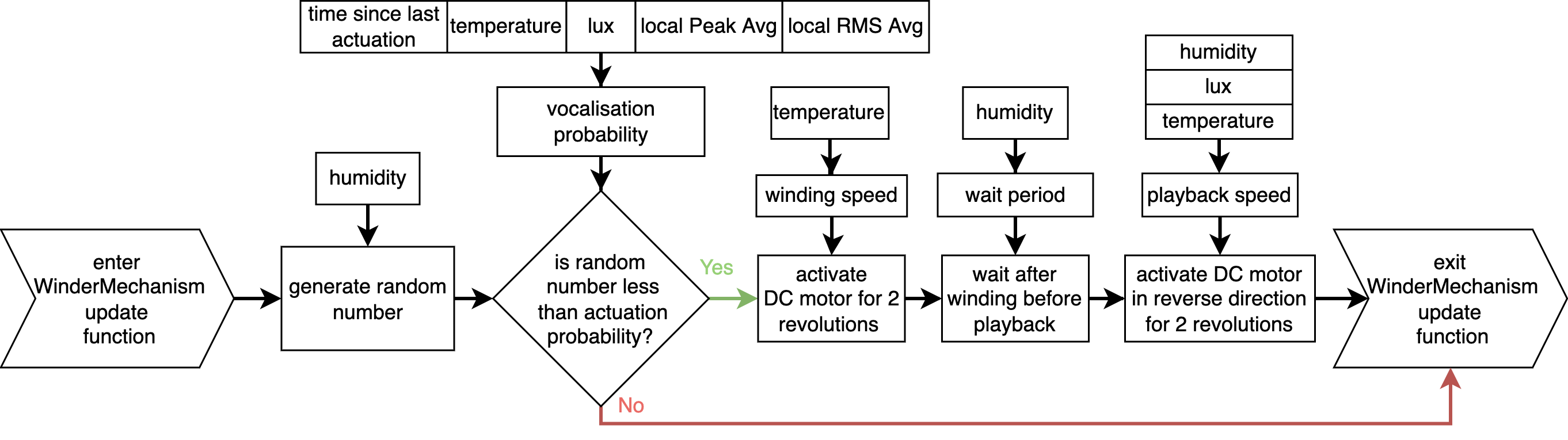
To help Chirper appear as an independent actor within the environment, when
the species experiences a period of prolonged silence, it attempts to initiate the call
and response dynamic itself by vocalising one of its memorised rhythms. Chirper
incorporates data collected from its environmental sensors to influence the frequency
of its vocalisations where Chirper is more likely to actuate its bells when conditions
are warm, dry, and bright and less likely to vocalise when the weather is cold, wet,
or dark. In the interest of respecting the high-level motivations for the Acropolis
aesthetic guidelines for presenting Chirper as a mechatronic creature, these mappings
seek to mirror those demonstrated by cold-blooded reptiles which are most active
when the weather is bright and hot, and, depending on the species, dry.
Realisations
Explorator chirper participated in five Hyper-Soundwalk Series pop-up installations
between September 23rd, 2020 and April 10th, 2021. Within these installations,
Chirper survived being fully exposed in winter rainstorms and in California’s barren
Death Valley without suffering physical or electronic damage apart from aesthetically
desirable rusting on some black-oxide fasteners. The 5622 g, 405 x 355 x 430 mm
artefact could be packed in a backpack and transported by a single person to and
from installation locations where it demonstrated an average runtime of 21.87 hours.
However, the species was still heavy and bulky enough to limit the reasonable travel
distance. Despite a few shortcomings with the current design, and merely adequate
visual aesthetics, the three-legged standing artefact consisting of a body, legs, and
one or more attached sensor breakout PCBs, proved a successful physical design
which can be applied to future species.
Chirper performed well from an artistic perspective as it realised its goal of
listening to the in-situ environment, extracting information about heard sounds, and
vocalising using parameters borrowed from analysed sounds. The artefact’s desk-bell
vocalisation mechanisms provided an intriguing sonic juxtaposition with the sonic
environments the artefact augmented. As the sounds produced by the bells are
undeniably anthrophonetic, they were easy to hear and identify within the broader
soundscape. While Chirper sometimes struggled to identify and create vocalisations
inspired by existing sonic actors using its cochlear vocalisation system, the artefact’s
non-cochlear visual feedback proved invaluable at visually linking the artefact with
the sonic environment to bring artistic continuity to the installations. Despite more
extended and complex configuration periods than desired and some difficulty in
providing feedback that directed attention to the in-situ sonic environment, Chirper
succeeded in realising the artistic and technological objectives of its assigned Hyper-
Soundwalk Series installation scenario and thus can be considered a successful first
Explorator species.